Cuộc đua của những ôtô robot tự lái
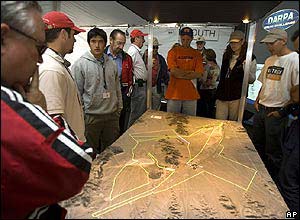 |
Lộ trình cuộc đua (Ảnh: AP) |
Phần thưởng dành cho chiếc xe hoàn thành đường đua 135 dặm (khoảng 217 km) trong thời gian ngắn nhất là 2 triệu USD. Đơn vị tổ chức Grand Challenge là Cơ quan các dự án nghiên cứu phòng vệ tiên tiến (Darpa) trực thuộc Bộ Quốc phòng Mỹ. Hiện nay, Darpa đang đẩy mạnh nghiên cứu và phát triển công nghệ không người lái. “Xe không người lái có thể đảm nhận những sứ mệnh nguy hiểm như tiếp tế quân nhu và như vậy có thể hạn chế thương vong trên chiến trường”, chuyên gia Ron Kurjanowicz ở Darpa cho biết. Với Sebastian Thrun của Đại học Stanford, kỹ sư thiết kế một trong những xe đua robot được yêu thích nhất, công nghệ xe tự lái còn nhắm đến mục tiêu làm cho đường phố an toàn hơn. “Rồi sẽ có ngày, xe hơi sẽ tự lái và bạn chỉ việc ngồi trên xe, đọc báo hay kiểm tra thư điện tử, đó sẽ là thắng lợi sau cùng”, Sebastian hình dung.
Tránh chướng ngại vật
Qua những dặm đầu tiên của đường đua, chiếc Stanley của Thrun tỏ ra là ứng cử viên sáng giá cho giải quán quân khi lướt với tốc độ đến 50 dặm/giờ (80 km/giờ). Stanley được chế tạo trên bộ khung của chiếc VW Touareg và trang bị hệ thống điều khiển điện tử qua dây dẫn cho phép xe vận hành bằng máy tính. Các thao tác như lái, sang số, tăng/giảm tốc độ và thắng đều được
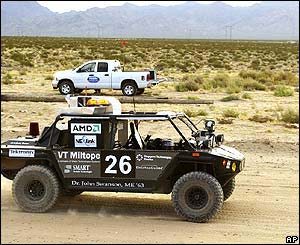 |
Những chiếc xe đua "không người lái" (Ảnh: AP) |
Robot vận dụng một loạt thiết bị đo để lập bản đồ 3 chiều (3D) của đường đi phía trước. Hệ thống radar sẽ “quét” địa hình trong khi đèn laser sẽ nhận dạng và định vị chướng ngại vật, dàn camera thì quan sát phía trước để cảnh báo từ xa những tình huống có thể dẫn đến va đụng. Một khi đã nắm rõ bản đồ, robot chỉ việc lựa chọn hướng chạy bằng phẳng và thông thoáng nhất. Cách thức hoạt động của xe robot nghe có vẻ đơn giản nhưng thực tế nó đòi hỏi công suất tính toán khổng lồ. Stanley sử dụng hàng triệu dòng lệnh tính toán đặc biệt và công suất xử lý của 7 máy tính trên xe để vẽ hướng đi và quyết định tốc độ chạy.
Thách thức trong nội ô
Qua 2 kỳ tổ chức, sân chơi Grand Challenge đã chứng minh giữa lý thuyết và thực tế vẫn còn một khoảng cách khá xa. Còn nhớ ở giải đấu đầu tiên (năm 2004), trong số 15 xe rời vạch xuất phát thì phân nửa đã gặp nạn ngay ở dặm đầu tiên. “Tay đua” thành công nhất Sandstorm – được cải tiến từ chiếc Hummer – chỉ chạy được 7 dặm. Tình hình năm ngoái có vẻ khá hơn nhưng từng chiếc một lần lượt rời khỏi cuộc đua. Một số bị hỏng hóc máy móc do địa hình phức tạp, nhưng đa số không về đến đích là do hệ thống điều khiển xác định sai đường đi, khiến robot lệch khỏi đường đua và lạc giữa sa mạc. Đến dặm thứ 36 đường đua chỉ còn lại 2 robot của Đại học Carnegie Mellon và chiếc Stanley. Lúc này, mỗi chiếc chạy theo lộ trình riêng và điều chỉnh tốc độ mỗi khi địa hình thay đổi. Sau khoảng 7 giờ tranh tài, chiếc Stanley của đội Đại học Stanford về đích đầu tiên và 20 phút sau, cả 2 robot của Carnegie Mellon cũng xuất hiện.
Cả 3 robot đã hoàn thành đường đua trong thời gian ngắn khiến không ít người kinh ngạc. Tuy nhiên, vẫn còn nhiều vấn đề cần được giải quyết. Chẳng hạn các robot trong cuộc đua Grand Challenge chỉ phải tránh những chướng ngại vật cố định. Điều gì sẽ xảy ra khi những chiếc xe này đối mặt với những hiểm họa di động như xe chạy ngược chiều hay người đi bộ? Giới nghiên cứu hy vọng những khuyết điểm này sẽ được khắc phục khi các xe robot tham gia giải đua lần thứ 3, mang tên mới DARPA Urban Challenge – dự kiến diễn ra vào ngày 3-11-2007. Tại cuộc chơi này, các robot “yêng hùng” sẽ tranh tài trên đoạn đường nội ô dài 60 dặm cùng lúc phải tránh xảy ra sự cố đồng thời tuân thủ luật giao thông.

Sebastian Thrun và chiếc xe đua Stanley do anh thiết kế. (Ảnh: AP)
QUÁCH HÙNG
Tham khảo thêm
Công nghệ
-

Vì sao kiến chúa sống lâu? Chuyên gia phát hiện bí quyết không ngờ!
-

10 bài nhạc giảm stress hiệu quả nhất thế giới
-

Top 11 địa danh bí ẩn bị làm mờ trên Google Maps, điều gì đang bị che giấu?
-

Vì sao thanh kiếm hơn 2.400 năm vẫn sắc bén, vừa chạm vào liền đứt tay?
-

Chiếc áo đặc biệt chống lại camera giám sát
-
Dự đoán năm 2024 của nhà tiên tri Vanga gây lo lắng






Tiêu điểm
-

Công ty Mỹ phát triển máy bay không cánh quạt tốc độ gần 1.000km/h
-
Búp bê tình dục sẽ có trí thông minh nhân tạo và cảm xúc
-
Quên AI đi, thời của trí tuệ hữu cơ tới rồi: Công nghệ táo bạo khiến chip máy tính trở nên lỗi thời
-
Robot cứu hộ, có khả năng cứu người đuối nước một cách nhanh chóng
-
Robot cứu hộ hình người của NASA
-
Giày phản lực: Lắp vào là tự bơi, thợ lặn chiến đấu tung hoành dưới biển!
-
Thử nghiệm thành công công nghệ tổng hợp hạt nhân không chất phóng xạ, năng lượng đủ cung cấp cho Trái đất hơn 100.000 năm







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video