Nhà khoa học Trung Quốc thiết kế robot thằn lằn có thể hoạt động trên sao Hỏa
Đại học Hàng không và Du hành vũ trụ Nam Kinh thiết kế robot thằn lằn 4 chân, bám đất đá tốt, thích hợp để di chuyển trên sao Hỏa.
Tiến sĩ Guangming Chen cùng các cộng sự tại Đại học Hàng không và Du hành vũ trụ Nam Kinh (NUAA) phát triển robot 4 chân mới lấy cảm hứng từ thằn lằn sa mạc, có thể giúp khám phá bề mặt sao Hỏa trong tương lai, Phys hôm 3/2 đưa tin. Nghiên cứu mới xuất bản trên tạp chí Biomimetics.
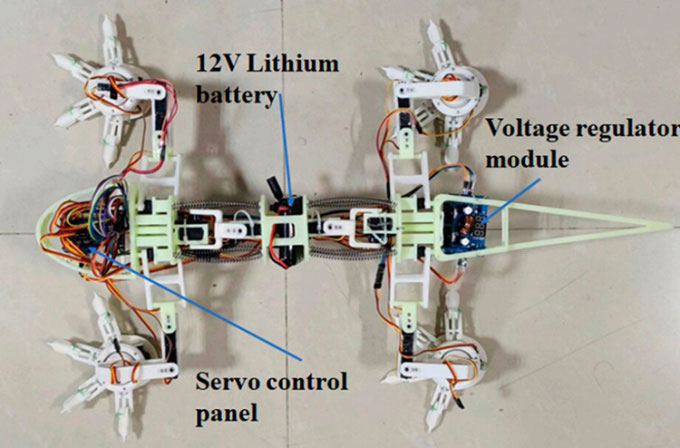
Nguyên mẫu robot 4 chân lấy cảm hứng từ thằn lằn sa mạc. (Ảnh: Biomimetics)
Do bề mặt sao Hỏa cấu tạo từ đất hạt và đá với nhiều kích thước khác nhau, các robot tự hành gặp khó khăn khi di chuyển trên đất mềm hay trèo qua đá. Để khắc phục những khó khăn trên, nhóm chuyên gia tại NUAA phát triển robot mới dựa trên đặc điểm di chuyển của thằn lằn sa mạc.
Robot mô phỏng sinh học này gồm một cấu trúc giống như cột sống linh hoạt và 4 chân. Để tái tạo cách di chuyển điển hình của thằn lằn, mỗi chân đều có hai bản lề và một bánh răng tạo ra chuyển động đung đưa.
Mỗi khớp hông nối cột sống với chân được làm bằng hai động cơ servo và cơ chế liên kết 4 thanh cho phép robot nâng cao cơ thể mà không mất thăng bằng. Bàn chân robot có 4 ngón, gồm hai bản lề và một móng vuốt. "Bàn chân có mắt cá chân và một miếng đệm tròn với 4 ngón chân linh hoạt, hiệu quả trong việc bám vào đất đá", nhóm nghiên cứu cho biết.
Ban đầu, nhóm chuyên gia đánh giá robot thông qua hàng loạt mô phỏng nhằm xác định xem nó có thể tái tạo hiệu quả các chuyển động của thằn lằn hay không. Họ thu được kết quả rất hứa hẹn khi robot có khả năng thực hiện các chuyển động và kiểu đi mong muốn.
Nhóm nhà khoa học chế tạo nguyên mẫu robot bằng các vật liệu nhựa in 3D, bảng điều khiển động cơ servo, pin lithium và các linh kiện điện tử khác. Sau đó, họ sử dụng môi trường mô phỏng để đánh giá chuyển động của nguyên mẫu trên các bề mặt đá giống địa hình sao Hỏa.
Chen cùng các cộng sự phát hiện, robot có thể di chuyển hiệu quả trong môi trường đá, cho thấy triển vọng ứng dụng trong các nhiệm vụ tương lai trên hành tinh đỏ. Tuy nhiên, trước khi robot hoạt động ngoài phòng thí nghiệm, họ cần cải tiến thêm, ví dụ như bổ sung vỏ kín để bảo vệ robot khỏi đất bụi trong không khí hay chế tạo phần thân bằng vật liệu bền hơn.
Hiện tại, nhóm chuyên gia đang nghiên cứu các mô hình học máy cho phép robot điều chỉnh chuyển động theo những địa hình khác nhau. Ngoài ra, họ dự định phát triển một hệ thống cung cấp điện liên tục cho robot.
Bài viết liên quan

Khám phá
-

Top 15 hiện tượng thiên nhiên kỳ lạ (1)
-

Những bức ảnh ma nổi tiếng thế giới
-

Cá voi xám tiếp cận thuyền, nhờ người bắt rận trên đầu
-
Tàu NASA phát hiện "bong bóng nhăn nheo" đang bọc lấy chúng ta
-

Hải ly xây những con đập khổng lồ như thế nào?
-

Những món ăn nguy hiểm nhất trên thế giới
Chinh phục sao Hỏa
-

Cấu trúc kỳ lạ bên dưới mặt trăng Phobos của sao Hỏa
-
Phát hiện bằng chứng mới cho thấy có nước trên Hỏa tinh
-
NASA công bố vật lạ trên sao Hỏa: Chứa sự sống ngoài hành tinh?
-
NASA tìm ra trực thăng Ingenuity gặp nạn ở nơi có thể chứa sự sống
-
Bên trong căn cứ mô phỏng sao Hỏa của NASA: Rộng rãi, có TV 55 inch, nhà bếp, phòng gym
-
NASA tìm ra dòng sông ngoài hành tinh có sự sống?




Tiêu điểm
-
NASA tung ảnh "dải thịt xông khói" ngoài hành tinh: Liệu có phải là sự sống ẩn mình?
-
NASA công bố ảnh 10 "kho báu" có thể chứa bằng chứng sự sống ngoài hành tinh
-
Tìm thấy đường bờ biển có thể là đại dương cổ đại trên sao Hỏa
-
Thực hư vật thể kỳ lạ giống mớ dây chằng chịt trên sao Hỏa
-
Con người trên sao Hỏa sẽ trông như thế nào?
-
NASA công bố hình ảnh đầu rắn chui ra trên hành tinh khác
-
Cậu bé nhớ được kiếp trước của mình là người sao Hỏa







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video