Robot báo Cheetah có thể học chạy để vượt qua giới hạn tốc độ của bản thân
Chúng ta đã từng nghe nói về robot Sophia. "Một chiếc máy thiên tài có tính năng phát triển qua thời gian, với trí thông minh liên tục tăng lên...", như lời tuyên bố của nhà phát triển. Do được thiết kế để có thể đưa ra các câu trả lời theo thời gian thực, Sophia không ít lần gây tranh cãi, thậm chí khiến nhiều người khiếp sợ khi đe dọa hủy diệt loài người. Thậm chí có lần "cô" còn đòi quyền làm "mẹ". Không ít người cho rằng Sophia là minh chứng cho việc công nghệ có thể phát triển mạnh mẽ đến mức tạo ra trí thông minh nhân tạo vượt qua cả trí tuệ và khả năng kiểm soát của con người.
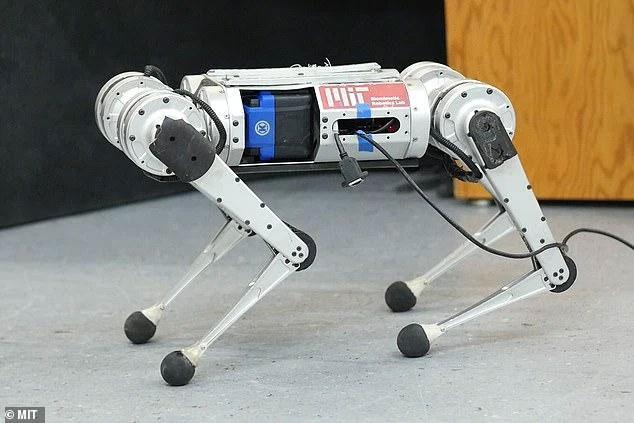
Dẫu vậy, Sophia hay tất cả robot khác đều phải hoạt động dựa theo các lập trình của người tạo ra chúng. Nhưng một sản phẩm mới của viện MIT (Mỹ), mang tên Cheetah mini, dường như đã vượt ra khỏi giới hạn đó. Nó biết học tập, rút kinh nghiệm để tự tìm ra cách tốt nhất để chạy và cho phép thích nghi với các địa hình khác nhau, mà không cần dựa vào sự phân tích của con người.
Robot Cheetah mini là phiên bản cải tiến của người anh em Cheetah ra mắt năm 2012, từng sở hữu khả năng đạt tốc độ tối đa 45,5 km/h. Nhưng Cheetah mini với sự hỗ trợ của hệ thống AI có thể trở nên nhanh nhẹn hơn nhờ vào khả năng tự học mà không cần thực nghiệm.
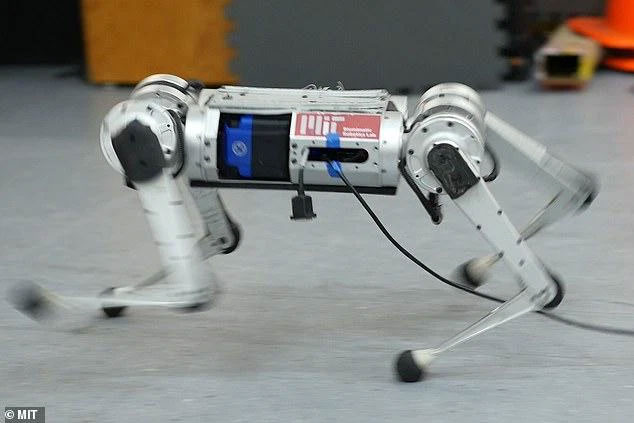
Chạy trên mọi địa hình với tốc độ cao, "con báo robot" bốn chân này chắc chắn sẽ khiến bạn giật bắn mình.
Trong một video mới được hé lộ, người ta có thể thấy con robot bốn chân này đâm vào các rào cản và tự đứng dậy, chạy qua các chướng ngại vật, chạy với một chân không hoạt động và khả năng thích ứng với các địa hình trơn trượt, băng giá cũng như những ngọn đồi đầy sỏi đá. Khả năng thích ứng cao này của nó là nhờ vào một mạng lưới thần kinh đơn giản có thể đưa ra các đánh giá về các tình huống trong thực tế.
Thông thường, cách thức di chuyển của robot là được điều khiển bởi một hệ thống sử dụng dữ liệu dựa trên phân tích cách các chi cơ học chuyển động, từ đó tạo ra các mô hình dùng làm hướng dẫn. Tuy nhiên, những mô hình này thường không hiệu quả và hợp vì không thể lường trước được mọi trường hợp xảy ra trong thực tế.
Khi robot đang chạy ở tốc độ cao nhất, giới hạn phần cứng của nó khiến hệ thống rất khó xây dựng mô hình, vì vậy chúng thường gặp khó khăn trong việc thích ứng nhanh chóng với những thay đổi đột ngột trong môi trường. Để khắc phục điều này, thay vì dựa trên các thiết kế phân tích sẵn, nhóm phát triển của MIT đã chọn cách xây dựng một robot có khả năng tự học bằng việc rút kinh nghiệm.

Robot Cheetah mini là phiên bản cải tiến của người anh em Cheetah ra mắt năm 2012.
Cụ thể, nó sẽ học, thử và rút kinh nghiệm khi sai mà không có sự can thiệp của con người. Nếu tích lũy đủ kinh nghiệm về các địa hình khác nhau, nó có thể tự thay đổi cách di chuyển để cải thiện hành vi của bản thân. Và trải nghiệm này thậm chí không cần phải diễn ra trong thế giới thực. Theo nhóm nghiên cứu, bằng cách sử dụng việc mô phỏng, Cheetah mini có thể tích lũy 100 ngày kinh nghiệm chỉ trong ba giờ khi đứng yên.
"Chúng tôi đã phát triển một cách tiếp cận mà nhờ đó hành vi của robot được cải thiện từ trải nghiệm mô phỏng. Và cách tiếp cận của chúng tôi cho phép triển khai thành công những hành vi đã học trong thế giới thực", nhóm nghiên cứu cho biết. "Trong tất cả các môi trường mà nó nhìn thấy trong trình mô phỏng này, khi hoạt động trong thế giới thực, bộ điều khiển sẽ xác định và thực hiện các kỹ năng liên quan trong thời gian thực."
Phá vỡ kỷ lục.
Kỷ lục về tốc độ cao trước đó được thiết lập bởi phòng thí nghiệm robot mô phỏng sinh học tại MIT vào năm 2019, khi robot đạt được tốc độ chạy tối đa 3,7m/s. Còn robot Cheetah mini mới đã đạt tốc độ hơn 3,9m/s (tương đương 14,04 km/h).
"Một cách thiết thực hơn để chế tạo một con robot với nhiều kỹ năng đa dạng là nói cho con rô bốt biết phải làm gì và để nó tìm ra cách thực hiện", nhóm nghiên cứu cho biết. "Hệ thống của chúng tôi là một ví dụ về điều này. Trong phòng thí nghiệm, chúng tôi đã bắt đầu áp dụng mô hình này cho các hệ thống robot khác, bao gồm cả bàn tay có thể cầm và thao tác nhiều vật thể khác nhau."

Các nhà nghiên cứu của MIT giải thích rằng, khá khó khăn để lập trình cho một robot chạy trên địa hình hiểm trở.
Nhưng với một hệ thống như trên, họ khẳng định rằng có thể mở rộng quy mô công nghệ, điều mà các mô hình truyền thống không thể làm được.

Robot Cheetah mini (trái) và một con chó thật (phải).
Kết quả nghiên cứu này cũng như các nghiên cứu robot mô phỏng động vật khác sẽ mang lại lợi ích cho cả lĩnh vực sinh học và chế tạo robot. Ngoài việc mang lại kiến thức mới, nếu robot có thể thay thế động vật trong tương lai, chúng sẽ giúp nhiều nhà khoa học có cơ hội nghiên cứu cơ chế vận động của động vật trong các điều kiện thí nghiệm khác nhau. Việc xác định cấu trúc của robot gần giống với cấu trúc của động vật sẽ dẫn đến sự phát triển của các công nghệ cơ bản để chế tạo robot có khả năng di chuyển và cơ động hiệu quả như động vật.
Bài viết liên quan

Công nghệ
-

Bạn có biết các nốt sần trên lá sung thực chất là gì không?
-

Nguồn gốc và ý nghĩa của cây hoa mai
-

Trung Quốc biến sa mạc rộng gấp 2 lần Thượng Hải, gây ám ảnh với cồn cát cao tới 60m thành ốc đảo xanh
-

"Tháng cô hồn" - Những điều kiêng kị và nên làm
-

Acsimet - nhà bác học vĩ đại của Hy Lạp cổ
-

Cây biết đau khi bị cắt và rên rỉ khi không được tưới nước
Công nghệ mới
-

Microchip cảm biến sinh học mới thúc đẩy phát triển thuốc điều trị
-
Graphene không thân thiện với con người và môi trường
-
Thang máy triệu USD không cần dùng dây cáp ở Đức
-
Mái nhà bê tông tạo ra điện từ ánh sáng Mặt Trời
-
Bề mặt lấy cảm hứng từ lá cây giúp ngăn sương giá
-
Xe điện siêu nhẹ có thể chạy 2.573km trong một lần sạc




Tiêu điểm
-
"Áo điều hòa" hòa giúp người lao động Nhật Bản hạ nhiệt trong mùa hè oi bức
-
Xe VinFast VF8 không người lái chạy thử nghiệm trên đường phố Việt
-
NASA tài trợ 11,5 triệu USD nghiên cứu máy bay tương lai
-
Trung Quốc chế tạo kính nhìn xuyên thấu quần áo
-
Thời đại vi chip sắp kết thúc, hãy chuẩn bị chào đón kỷ nguyên của siêu chip
-
Mắt kính phiên dịch mọi ngôn ngữ khác nhau của Google
-
Khoa học công nghệ Trung Quốc: Từ bắt chước đến thống trị thế giới!







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video