Robot đi bộ nhanh nhất thế giới
Các nhà nghiên cứu robot châu Âu vừa chế tạo robot đi bộ nhanh nhất thế giới được đặt tên là Runbot. Nó có thể di chuyển với tốc độ bằng 3 lần chiều dài chân trong 1 giây, chậm hơn một chút so với người bình thường đi nhanh.
Runbot hoạt động dựa trên nguyên lý động lực, có khả năng tự học dựa trên cơ sở lý thuyết từ những năm 1930 của Nikolai Bernstein - một nhà Sinh lý học người Nga.
Nó có thể đi giống người, vượt qua các chướng ngại vật với khả năng thay đổi cách đi uyển chuyển dựa trên môi trường xung quanh. Ví dụ khi có 1 người đi qua, nó sẽ tự động đứng lại hoặc tránh ra xa.
Trên các khớp và chân Runbot có gắn các cảm biến ngoại vi, các gia tốc kế để quản lý bước di chuyển của robot. Tín hiệu từ cảm biến sẽ được gửi tới các bộ phận xử lý cục bộ - được xem như các thần kinh nhân tạo. Hệ thống này sẽ phân tích thông tin và đưa ra các tín hiệu để điều chỉnh cách thức di chuyển theo thời gian thực.
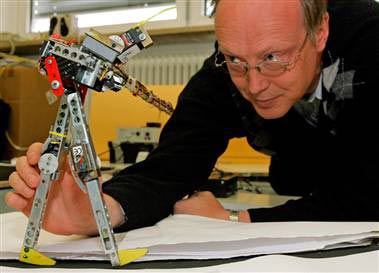
Nhà nghiên cứu Florentin Woergoetter (Ảnh: Hubert Jelinek / EPA)
Thông tin từ các cảm biến gắn trên Runbot luôn được cập nhật và được tạo trong quá trình tương tác của nó với địa hình di chuyển, vì thế nó có thể điều chỉnh bước đi nếu như có sự thay đổi từ môi trường xung quanh.
Theo các nhà thiết kế Runbot, nó có thể đi lên và xuống dốc mà không cần trợ giúp; có thể hiệu chỉnh trọng tâm; di chuyển theo nhiều cách với các phương án chuyển động thích hợp. Họ cũng cho biết sẽ chế tạo Runbot lớn hơn, thích nghi nhiều hơn với sự thay đổi của môi trường xung quanh.
Chu kỳ di chuyển của robot chia ra làm 6 bước (ảnh):
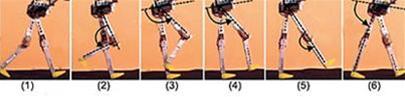 |
Chu kỳ di chuyển của Runbot |
• Bước 1 - 3: Động lượng của robot khiến cho robot đứng trên một chân và chân kia sẽ di chuyển lên phía trước.
• Bước 3: Cảm biến kéo căng của chân vừa bước lên được kích hoạt, công tắc của đầu gối được bật lên và chân duỗi ra.
• Bước 3 - 6: Robot sẽ ngã ra phía trước mà không cần sử dụng động cơ và sau đó là tự đứng trên một chân.
• Bước 6: Khi chân vừa bước lên chạm đất, cảm biến đặt ở gan bàn chân robot tiếp xúc với nền, chân trụ được co lại và đi lên. Bắt đầu một chu kỳ mới.
MINH ANH
Công nghệ
-

Làm pháo hoa
-

Những quốc gia trao thưởng cả tỷ đồng cho người nước ngoài đến sinh sống
-

Lần đầu tiên giới khoa học chụp ảnh được hiện tượng rối lượng tử trong thời gian thực
-

Vùng đất 120.000 năm không có ánh Mặt trời ở Nam Cực
-

Cánh "cổng liên lạc" trong phim viễn tưởng xuất hiện tại châu Âu
-

Những động vật đang “đối mặt” với nguy cơ tuyệt chủng
Công nghệ mới
-

Cảm biến sinh học phát hiện virus trong hàu biển
-
Các phi hành gia sẽ uống nước từ... toilet!
-
Trung Quốc thử nghiệm máy dò sự sống bằng radar băng siêu rộng
-
Nơron nhân tạo thay thế dây thần kinh trong não người
-
Xe hai bánh có tốc độ nhanh nhất thế giới
-
Keo dán gạch, đá công nghệ mới




Tiêu điểm
-
Pin thể rắn giá rẻ của Trung Quốc - bước đột phá cho ngành xe điện?
-
"Áo điều hòa" hòa giúp người lao động Nhật Bản hạ nhiệt trong mùa hè oi bức
-
Thời đại vi chip sắp kết thúc, hãy chuẩn bị chào đón kỷ nguyên của siêu chip
-
NASA tài trợ 11,5 triệu USD nghiên cứu máy bay tương lai
-
Robot chó đầu tiên hoàn thành cuộc thi chạy marathon chỉ với một lần sạc
-
Cận cảnh mẫu ô tô mini giá chỉ 150 triệu đồng đang gây sốt: Chạy xe không cần bằng lái
-
Mắt kính phiên dịch mọi ngôn ngữ khác nhau của Google







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video