Robot suy nghĩ như người?
Phần lớn trẻ em học hình học rất khó khăn nhưng chúng lại có khả năng bắt một quả bóng mà không cần tính toán đường pa-ra-bôn của nó. Vậy thì tại sao robot cần phải nghĩ khác? Một nhóm các nhà khoa học châu Âu đã phát triển hệ thống nhận thức nhân tạo học hỏi từ kinh nghiệm và sự quan sát hơn là dựa và những định luật có sẵn và các hình mẫu.
Dưới sự chỉ đạo của Đại học Linköping, Thụy Điển, các nhà khoa học thuộc dự án COSPAL đã sử dụng một phương pháp tiến bộ để khiến các robot nhận ra, xác định và tương tác với vật thể, đặc biệt là trong những tình huống ngẫu nhiên và bất ngờ.
Công nghệ robot truyền thống dựa vào khả năng robot thực hiện các tính toán phức tạp, ví dụ như xác định hình học của một vật thể và dự đoán đường đi của nó nếu nó di chuyển. Nhưng COSPAL đã quay ngược tiến trình này lại, khiến cho các robot thực hiện những nhiệm vụ dựa trên kinh nghiệm và quá trình quan sát con người của riêng chúng. Phương pháp thử-và-lỗi này có thể dẫn đến sự ra đời của nhiều robot tự động và thậm chí tăng cường những hiểu biết của chúng ta về bộ não con người.
Michael Felsberg, điều phối viên của dự án COSPAL do châu Âu tài trợ, cho biết “Gösta Granlund, trưởng Phòng thí nghiệm Viễn cảnh máy tính tại Đại học Linköping, đã nghĩ ra ý tưởnghành động đi trước nhận thức trong học hỏi. Điều này nghe có vẻ phản trực giác, nhưng thực chất chính xác đó là cách con người học hỏi.”
Ông nhấn mạnh rằng trẻ em “luôn luôn kiểm nghiệm và thử mọi thứ”. Thông qua việc thực hiện những hành động ngẫu nhiên – chỉ vào vật này hoặc chạm vào vật khác – trẻ em sẽ hiểu được nguyên nhân-hậu quả và có thể áp dụng được kiến thức này trong tương lai. Bằng cách thử nghiệm, trẻ em nhanh chóng phát hiện rằng một quả bóng sẽ lăn và không thể nắm được một cái lỗ. Trẻ em có thể học hỏi từ việc quan sát người lớn và bắt chước hành động của họ, tăng cường hiểu biết về thế giới xung quanh chúng.
Học giống người và học từ người
 |
Các robot đang nhận diện tín hiệu và biểu tượng như màu sắc. (Ảnh: COSPAL) |
Ứng dụng trong ngữ cảnh của hệ thống nhận thức nhân tạo (ACS), phương pháp này giúp tạo ra các robot có thể học hỏi nhiều như con người và có thể học từ chính con người, cho phép chúng tiếp tục thực hiện những nhiệm vụ mà khi môi trường của chúng thay đổi hoặc khi một vật thể mà chúng không được lập trình nhận ra, được đặt trước mặt chúng.
“Phần lớn hệ thống ACS dựa trên trí thông minh nhân tạo khá thành công trong việc nhận ra những vật thể dựa trên tính toán hình học hoặc nguồn vào ảnh. Một số người tranh cãi rằng con người cũng thực hiện những bước tính toán như thế để xác định một điều gì đó nhưng tôi không tin điều đó. Tôi nghĩ rằng con người rất giỏi việc nhận ra hình học của các vật thể từ kinh nghiệm.”
Hệ thống ACS của nhóm COSPAL dường như muốn chứng minh cho lý thuyết trên. Một robot không có những kiến thức hình học lập trình trước có thể nhận ra vật thể đơn giản từ kinh nghiệm, thậm chí khi môi trường xung quanh và vị trí của máy ảnh nó dùng để thu các thông tin hình ảnh bị thay đổi.
Đặt đúng móc vào đúng lỗ
Loại trò chơi phân biệt hình dạng thường dùng để dạy trẻ em được sử dụng để kiểm tra hệ thống này. Thông qua thử-lỗi và quan sát, robot có thể đặt những hình khối vào các lỗ vuông và những móc tròn vào lỗ tròn với độ chính xác đến 2mm và 2 độ. “Điều này chứng minh được nó có thể giải những bài toán hình học mà không cần phải hiểu biết về hình học. Thực chất, tôi quan sát đứa con trai 11 tháng tuổi của tôi giải trò chơi trên: quá trình học hỏi trên đứa bé và robot rất giống nhau.”
Một bài kiểm tra khả năng của robot học hỏi từ quan sát bao gồm việc sử dụng một cánh tay robot bắt chước chuyển động của cánh tay người. Chỉ cần từ 20 đến 60 lượt quan sát, cánh tay robot có thể theo dõi cử động cánh tay người qua một khoảng không giả, tránh những chướng ngại vật trên đường. Trong những lần thử nghiệm sau với cùng một robot, thời gian học hỏi được giảm đi rất nhiều, cho thấy rằng ACS thực sự rút ra những ký ức dựa trên các quan sát trong quá khứ.
Thêm vào đó, bằng cách áp dụng những ý tưởng có vẻ như chưa logic này, nhóm nghiên cứu đã nghĩ ra một cách giúp cho robot nhận diện những tín hiệu và biểu tượng như màu sắc. Thay vì sử dụng ba con số để biểu thị màu đỏ, xanh lục và xanh lam như trong các ứng dụng xử lý hình ảnh kỹ thuật số, nhóm nghiên cứu bắt hệ thống này học màu từ những cặp ảnh và những bộ tên màu tham khảo tương ứng như đỏ, đỏ thẫm, xanh xanh thẫm dưới dạng mã hóa kênh. Tương tự như cách mà bộ não con người nhận diện màu sắc với các nhóm nơ-ron khởi động chọn lọc để phân biệt xanh lục với màu đen, mã hóa kênh là một cách truyền đạt thông tin dựa trên sinh học.
“Là con người, chúng ta có thể sử dụng lý do để diễn dịch một vật thể là gì bằng quá trình loại trừ. Ví dụ như chúng ta biết rằng nếu một vật thể có những đặc tính như thế này thì nó là vật thế này chứ không phải một vật khác. Mặc dù loại hình lý giải máy móc như thế đã từng được sử dụng trước đây, chúng tôi đã phát triển một phiên bản tiến bộ của quá trình nhận diện vật thể sử dụng những thông tin biểu tượng và hình ảnh lên đến tầm ảnh hưởng lớn.” Felsberg cho biết.
Công nghệ
-

Tại sao khi chiến đấu, kẻ địch không giết ngựa của đối phương?
-

Kenguru – chiếc xe sinh ra cho người khuyết tật, chỉ có một cửa duy nhất nhưng cực tiện cho người đi xe lăn
-

Vườn quốc gia Mesa Verde - Hợp chủng quốc Hoa kỳ
-
'Mộ tặc' bật nắp quan tài Từ Hi Thái hậu: Thứ bên trong khiến nhiều kẻ hoảng sợ, bỏ chạy tán loạn
-

Làm sao người xưa biết một năm có 365,2467 ngày?
-

Cá nóc hòm vàng - Loài cá có hình vuông kỳ lạ
Công nghệ mới
-

Chế tạo thành công thiết bị biến nước thành điện
-
Toilet thông minh cho khu vực thiên tai
-
Khung xương robot HULC sử dụng tế bào năng lượng
-
Chế tạo thành công tay robot cử động uyển chuyển như tay người thật
-
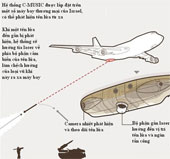
Hệ thống phòng thủ tên lửa cho máy bay chở khách
-
Xây nhà bằng công nghệ in 3D không cần dùng gạch





Tiêu điểm
-
Bay giả lập với MiG-29
-
Búp bê tình dục sẽ có trí thông minh nhân tạo và cảm xúc
-
"Trí tuệ nhân tạo" AlphaGo là gì mà khiến con người thán phục?
-
Mắt kính phiên dịch mọi ngôn ngữ khác nhau của Google
-
Kenguru – chiếc xe sinh ra cho người khuyết tật, chỉ có một cửa duy nhất nhưng cực tiện cho người đi xe lăn
-
Tái tạo khuôn mặt của người 7 triệu năm trước
-
Bộ áo giáp thông minh nhẹ nhất thế giới







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video