-
 9 điều không nên làm khi đi vệ sinh
9 điều không nên làm khi đi vệ sinh Chuyện đi vệ sinh tưởng chừng như là nhu cầu cá nhân rất bình thường của con người, nhưng có những thói quen không tốt cho sức khỏe khiến bạn kinh ngạc từ việc đi vệ sinh không đúng cách.
-
 Nghi vấn mới về "Nàng tiên cá" có thật trong lịch sử
Nghi vấn mới về "Nàng tiên cá" có thật trong lịch sử Cho tới nay, các nhà nghiên cứu vẫn cố gắng đi tìm lời giải về việc Nàng tiên cá có thực sự tồn tại như những câu chuyện được lưu truyền trên thế giới hay không.
-
 Hướng dẫn cách trồng dưa leo trong chậu an toàn, sai quả
Hướng dẫn cách trồng dưa leo trong chậu an toàn, sai quả Dưa leo, hay tên gọi khác là dưa chuột là loại quả được liệt kê vào danh sách không thể thiếu trong bữa ăn hay làm đẹp của con gái. Vì vậy, mọi người nên bỏ túi kỹ thuật trồng dưa leo trong chậu đúng cách để có thể tự trồng tại nhà.
-
 Những bí ẩn ít người biết về con tàu Titanic huyền thoại
Những bí ẩn ít người biết về con tàu Titanic huyền thoại Con tàu khổng lồ Titanic đi vào lịch sử và nổi tiếng kể từ khi bị chìm vào năm 1912. Trước đó Titanic được vinh danh khắp thế giới là con tàu lớn nhất lúc bấy giờ. Sự kiện được xem là thảm họa hàng hải nghiêm trọng nhất mọi thời đại. Mặc dù Titanic bị chìm hơn 100 năm nhưng những câu chuyện bí ẩn xoay quanh con tàu này vẫn là đề tài nóng hổi, thu hút nhiều độc giả trên khắp thế giới.
-
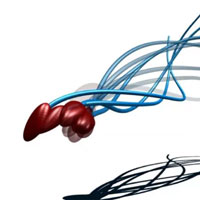 Phát hiện mới về cách hoạt động của tinh trùng, đánh đổ quan niệm sai lầm suốt 300 năm nay
Phát hiện mới về cách hoạt động của tinh trùng, đánh đổ quan niệm sai lầm suốt 300 năm nay Nghiên cứu mới cho thấy tinh trùng người có cách bơi giống con rái cá hơn là giống con lươn, được biết đến trong vật lý giống như khi quỹ đạo của Trái đất và Sao Hỏa quay quanh mặt trời.
-
 Chữa mụn rộp ở môi
Chữa mụn rộp ở môi Mụn rộp ở miệng hay dân gian còn gọi là giời leo với biểu hiện là những mụn nước xung quanh miệng do virus herpes simplex gây ra. Bệnh nghiêm trọng theo thời gian và dễ dàng lây qua tiếp xúc nhất là khi hôn nhau.
-
 Quy trình trồng, chăm sóc và bảo vệ cây hồ tiêu
Quy trình trồng, chăm sóc và bảo vệ cây hồ tiêu Hy vọng những nghiên cứu dưới đây giúp bà con nông dân kiểm soát được những loại cây trồng chung quanh mình nói chung và cây hồ tiêu nói riêng.
 Ngôi "làng bò" kỳ lạ, không ai biết đi đứng, chỉ có thể bò bằng 4 chi Người dân sống tại ngôi làng này không ai có thể đi đứng bình thường, họ chỉ có thể bò bằng 4 chi và ngay cả đứa trẻ con cũng vậy.
Ngôi "làng bò" kỳ lạ, không ai biết đi đứng, chỉ có thể bò bằng 4 chi Người dân sống tại ngôi làng này không ai có thể đi đứng bình thường, họ chỉ có thể bò bằng 4 chi và ngay cả đứa trẻ con cũng vậy. “Dịch chuyển tức thời”: Một trường hợp kỳ lạ Theo tưởng tượng, “dịch chuyển tức thời” (teleport) hay còn gọi là “biến - hiện” xảy ra khi một người bước vào máy quét khổng lồ và chỉ vài giây sau sẽ xuất hiện ở một nơi khác, với tâm trí, cơ thể và linh hồn vẫn là một thể thống nhất.
“Dịch chuyển tức thời”: Một trường hợp kỳ lạ Theo tưởng tượng, “dịch chuyển tức thời” (teleport) hay còn gọi là “biến - hiện” xảy ra khi một người bước vào máy quét khổng lồ và chỉ vài giây sau sẽ xuất hiện ở một nơi khác, với tâm trí, cơ thể và linh hồn vẫn là một thể thống nhất. “Truyền nhân” của nhà tiên tri Vanga dự đoán gì đầu tiên? Nhà tiên tri nổi tiếng Vanga qua đời năm 1996, nhưng trước khi về "thế giới bên kia", bà đã kịp đề cập đến "truyền nhân" của mình. Và giờ đây, người đó đã xuất hiện...
“Truyền nhân” của nhà tiên tri Vanga dự đoán gì đầu tiên? Nhà tiên tri nổi tiếng Vanga qua đời năm 1996, nhưng trước khi về "thế giới bên kia", bà đã kịp đề cập đến "truyền nhân" của mình. Và giờ đây, người đó đã xuất hiện... Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng