Nhật Bản chế tạo robot Asterisk 6 chân
Các nhà nghiên cứu làm việc tại phòng thí nghiệm Robotics Arai, Đại học Osaka, Nhật Bản, đã chế tạo thành công Robot Asterisk (với 6 chân được bố trí đối xứng đặt cách nhau ở khoảng cách 60 độ quanh cơ thể Robot); đây là kết quả của quá trình nghiên cứu trong hơn 6 năm qua, nhằm phát triển các chức năng của Robot 6 chân, nhằm thực hiện các nhiệm vụ quan trọng trong nhiều lĩnh vực của xã hội, bao gồm việc : tìm kiếm, cứu nạn và bảo trì các tòa nhà.
Nhìn từ trên xuống, Robot Asterisk: với 6 chân được bố trí đối xứng đặt cách nhau ở khoảng cách 60 độ quanh cơ thể Robot, mỗi chân lại có 4 cấp độ tự do, cho phép Robot Asterisk gần như có thể di chuyển theo mọi hướng bất kỳ, Robot Asterisk không có quy định rõ về phần "đầu" và phần "đáy", cho nên khi bị lộn ngược xuống, Robot Asterisk dễ dàng định hướng lại các chân và tiếp tục thực thi nhiệm vụ.
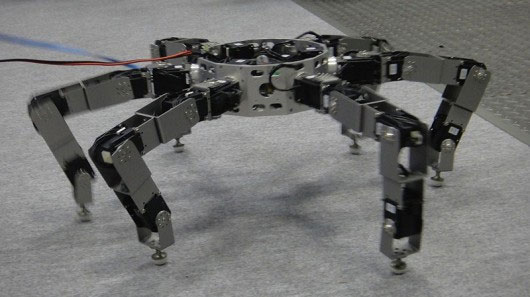
Robot Asterisk có thể hiểu tường tận môi trường xung quanh nhờ sử dụng nhiều loại cảm biến phản hồi các thông tin khác nhau: đầu của các chân (6 chân) robot được trang bị thiết bị cảm biến áp lực (3 chân có gắn thiết bị cảm biến hồng ngoại, 3 chân còn lại được trang bị các máy quay phim không dây). Các giác quan của Robot được cấu thành từ: thiết bị cảm biến con quay hồi chuyển, máy đo gia tốc và 03 máy quay phim CCD. Sau mỗi lần sạc điện cho cục pin nhựa lithium, thì Robot Asterisk (4kg) có thể hoạt động trong khoảng 15 phút.
Hiện nay, Robot Asterisk có thể đi bộ (với vận tốc lên đến 0,5m/giây hoặc 1,64ft/s), được trang bị 06 bánh xe cuộn ở chân. Robot nhận dạng được cầu thang và nắm giữ vật thể bằng 02 trong 06 chân, đẩy vật nặng, tránh chướng ngại vật, đi bộ, lật ngược hoặc thẳng đứng trên bề mặt chấn song sắt và thậm chí có thể nhào lộn. Robot Asterisk cũng có thể chuyển đổi thành cấu hình khiêm tốn hơn (76,2mm thay vì 78mm chiều cao) để đi vào các khoảng trống chật hẹp hơn (trong tình huống cứu nạn sau thảm họa), điều này có thể sẽ giúp cứu sống nhiều mạng người.
Công nghệ
-

Tại sao đồng tử loài mèo nằm dọc còn đồng tử loài dê lại nằm ngang?
-

Thuyết Big Bang sụp đổ, chuyện gì xảy ra với vũ trụ?
-
Thành phố nghìn năm không trồng nổi 1 cây xanh: Thưởng 1 tỷ cho ai "giải cứu" thành công
-

Những điều đại kỵ không nên làm trong thứ 6 ngày 13
-

Vì sao cửa sổ máy bay có 1 lỗ nhỏ?
-

Đào đất xây nhà, nhóm công nhân đụng trúng kho báu tiền tỷ





Tiêu điểm
-

"Trí tuệ nhân tạo" AlphaGo là gì mà khiến con người thán phục?
-
Áo năng lượng mặt trời có thể sạc smartphone
-
Mắt kính phiên dịch mọi ngôn ngữ khác nhau của Google
-
Kenguru – chiếc xe sinh ra cho người khuyết tật, chỉ có một cửa duy nhất nhưng cực tiện cho người đi xe lăn
-
Trung Quốc chế tạo kính nhìn xuyên thấu quần áo
-
Pin vi khuẩn
-
Búp bê tình dục sẽ có trí thông minh nhân tạo và cảm xúc







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video